Wyrównywanie linii nawigacyjnych
Wyrównanie linii nawigacji zapewni dokładne punkty odniesienia, które będą odzwierciedlały drogę zewnętrznych krawędzi pojazdu. Linie te należy wyrównać oddzielnie dla każdej kamery cofania.
- W menu głównym wybierz
 > Widok z tyłu.
> Widok z tyłu. - Jeśli masz podłączoną więcej niż jedną kamerę, skorzystaj z opcji
 > Wybierz kamerę, aby wybrać kamerę, którą chcesz dostosować.
> Wybierz kamerę, aby wybrać kamerę, którą chcesz dostosować. - Wybierz > Ustawienia > Dostosuj linie nawigacji.
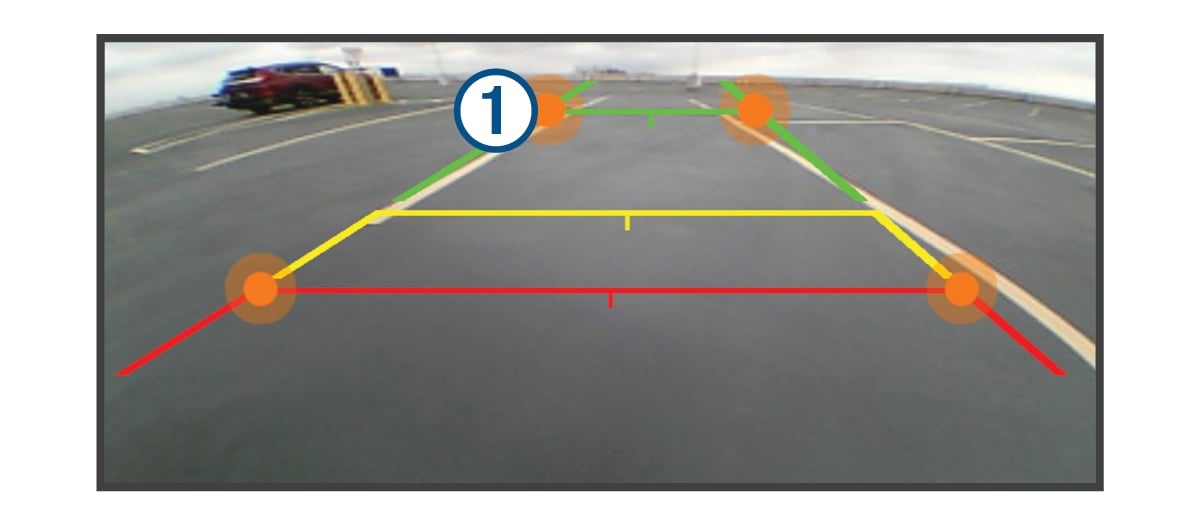
- Przeciągnij kółka w rogach linii nawigacyjnych
 , aby dopasować je do kąta i położenia krawężnika, podjazdu lub linii miejsca parkingowego.
, aby dopasować je do kąta i położenia krawężnika, podjazdu lub linii miejsca parkingowego. Linie nawigacyjne powinny pojawiać się bezpośrednio nad obranymi punktami odniesienia.
Czerwona część linii nawigacyjnych powinna być wyrównana z tyłem pojazdu.
- Po zakończeniu wyrównywania wybierz
 .
.