Wyrównywanie linii nawigacyjnych
Wyrównanie linii nawigacji zapewni najdokładniejsze punkty odniesienia, które będą odzwierciedlały drogę zewnętrznych krawędzi pojazdu. Linie te należy wyrównać oddzielnie dla każdej kamery cofania. W niektórych modelach regulacja jest dostępna automatycznie po sparowaniu kamery.
Przed rozpoczęciem korzystania z urządzenia oraz po wykonaniu wszelkich regulacji kąta kamery należy upewnić się, że linie nawigacyjne są prawidłowo wyrównane. Nieprawidłowe ustawienie linii nawigacji może prowadzić do wypadków lub kolizji skutkujących śmiercią, poważnymi obrażeniami ciała lub zniszczeniem mienia.
-
Wybierz opcję:
-
W widoku z kamery dotknij ekranu i wybierz
 .
. -
W widoku z kamery wybierz kolejno
 > Dostosuj wideo.
> Dostosuj wideo.
-
-
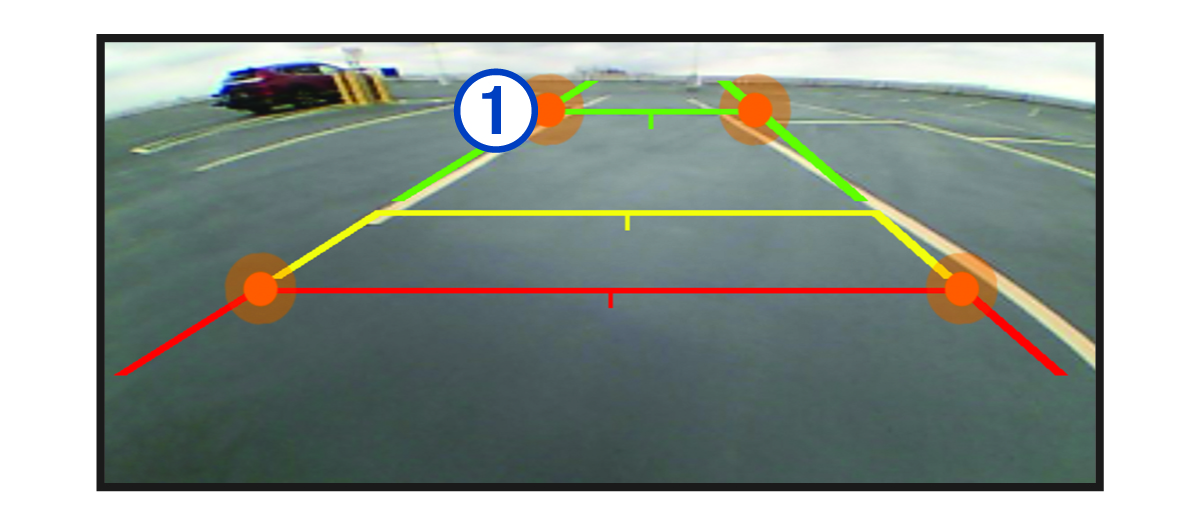
Przeciągnij kółka w rogach linii nawigacyjnych
 , lub dotknij strzałek, aby dopasować je do kąta i położenia krawężnika, podjazdu lub linii miejsca parkingowego.
, lub dotknij strzałek, aby dopasować je do kąta i położenia krawężnika, podjazdu lub linii miejsca parkingowego.
Linie nawigacyjne powinny pojawiać się bezpośrednio nad obranymi punktami odniesienia.
Czerwona lub pomarańczowa część linii nawigacyjnych powinna być wyrównana z tyłem pojazdu.
-
Wybierz
 po zakończeniu wyrównywania.
po zakończeniu wyrównywania.